Роботизированная система da Vinci S дает естественное уравнивание глаз и рук на хирургической консоли, что обеспечивает лучшую эргономику, чем традиционная лапароскопия. Так как роботизированные «руки» держат камеру и инструменты на весу, это потенциально уменьшает скручивающий момент на брюшной стенке, травму пациента, необходимость в ассистировании и утомляемость. Благодаря дополнительной механической силе, которую дают роботизированные руки, хирург может оперировать пациентов даже с выраженным ожирением.
В настоящее время самой частой гинекологической операцией в большинстве стран мира является гистерэктомия с удалением или сохранением придатков матки, выполняемая по поводу миомы [1]. Так, в Швеции частота гистерэктомий среди полостных гинекологических операций составляет 38%, в США – 36%, в Великобритании – 25% [4].
Существует несколько доступов для удаления матки: абдоминальный, вагинальный, лапароскопический, а также с использованием роботизированной системы da Vinci S. Выбор способа
операции зависит от квалификации и опыта хирурга, показаний и противопоказаний к различным вариантам вмешательств, в том числе от величины матки и ее мобильности, размера влагалища и от сопутствующих заболеваний.
Американский хирург Е.McDowell был первым, кто в начале XIX века через продольный разрез
передней брюшной стенки выполнил плановую овариотомию с благоприятным исходом [8].
История радикального хирургического лечения больных миомой матки началась в середине XIX века именно с лапаротомических операций, произведенных по поводу больших объемных опухолей. Лапаротомическая гистерэктомия возникла не как продуманная плановая операция, а как следствие ошибок предоперационной диагностики. В 1843 г. английский хирург С. Сlау, собираясь выполнить овариотомию, после вскрытия брюшной полости обнаружил миому матки, соответствующую размеру 8-месячной беременности. Именно он и произвел первую в истории субтотальную гистерэктомию.
Больная погибла от шока через полтора часа после операции [6, 7]. В 1844 г. он же произвел
и первую тотальную гистерэктомию. Пациентка умерла на 18-е сут после хирургического вмешательства вследствие возникшего перитонита [7]. Первая субтотальная гистерэктомия с успешным исходом была выполнена W. Burnham спустя десятилетие. Несмотря на то что послеопераци-
онный период у пациентки осложнился перитонитом, она выздоровела.
В России первые субтотальные гистерэктомии были произведены в 1866 г. В.Ф. Грубе в Харькове,
затем в 1867 г. Н.В. Склифосовским в Одессе и в 1868 г. А. Я. Крассовским в Санкт-Петербурге.
Все три больные погибли после операции.
К середине 20-х – началу 30-х гг. ХХ века лапаротомия стала преобладающим доступом при хирургическом лечении больных миомой матки.
Гистерэктомии, выполняемые влагалищным доступом, у больных миомой матки получили распространение с начала 80-х гг. XIX столетия благодаря работам хирургов французской школы и,
прежде всего, J. Pean. В России этот доступ при экстирпации матки был разработан и усовершенствован выдающимся отечественным акушеромгинекологом Д.О. Оттом. Основным недостатком влагалищных вмешательств являлась неосведомленность хирурга о реальном состоянии внутренних половых органов в области малого таза. Идея осмотра органов брюшной полости с
помощью введения в нее осветительных приборов впервые была осуществлена Д.О. Оттом (1901).
Автор назвал данный метод вентроскопией, явившейся предтечей современной лапароскопии.
Введение в практику лапароскопии для операций на тазовых органах коренным образом изменило облик оперативной гинекологии. Впервые лапароскопическим доступом удалил матку H. Reich в 1988 г. В России первое сообщение о лапароскопической экстирпации матки принадлежит В.И. Карнауху и М.Т. Тугушеву (1993) [2]. За последние 2 десятилетия лапароскопическая гистерэктомия прочно вошла в повседневную практику, серьезно потеснив лапаротомию и вагинальный доступ.
К новым направлениям, связанным с эндоскопической хирургией, относится разработка роботов и телеоперационных систем. Робот-ассистированное выполнение операций является новым техническим решением в различных отраслях хирургии, включая гинекологию. Интуитивная система da Vinci S создана в 1999 г. С этого времени прослеживается тенденция к увеличению количества и спектра выполняемых вмешательств с использованием робототехники. Первая гинекологическая робот-ассистированная операция (трубный реанастомоз) состоялась в 1999 г. с использованием комплекса ZEUS. С тех пор в оперативной гинекологии, главным образом с применением роботизированных систем da Vinci S, выполняются многие хирургические вмешательства. На сегодняшний день стало очевидным, что выполнение сложных операций, требующих прецизионных действий в малых пространствах, существенно облегчается с использованием хирургического робота.
В 2005 г. в США впервые была выполнена гистерэктомия при помощи роботизированной системы da Vinci S [5], в России – спустя 3 года [3].
Цель настоящего исследования заключалась в первичном анализе робот-ассистированных лапароскопических простых гистерэктомий с использованием роботического комплекса da Vinci S.
Материал и методы исследования
В период с марта 2009 по август 2011 г. в клинике женских болезней и репродуктивного здоровья ФГБУ НМХЦ им. Н.И. Пирогова Минздравсоцразвития России под нашим наблюдением находились 33 женщины в возрасте от 38 до 63 лет (средний возраст 46,3±5,8 года) с доброкачественными опухолями матки и яичников. Масса тела пациенток была от 48,4 до 106,43 кг (в среднем 77,4±2,7 кг), индекс массы тела – от 21,9 до 33,25 кг/м2 (в среднем 26,07±0,4 кг/м2). Под простой гистерэктомией в настоящее время понимают экстирпацию матки с придатками или без таковых. Расширенная гистерэктомия – это удаление матки с придатками и тазовой и/или парааортальной лимфаденэктомией.
Всем 33 больным с использованием роботизированной системы da Vinci S было выполнено 27 простых гистерэктомий и 6 надвлагалищных ампутаций матки (табл. 1). У 3 больных миома матки сочеталась с аденомиозом, у 9 – с доброкачественными новообразованиями яичников и патологией маточных труб, у 4 – с гиперплазией эндометрия.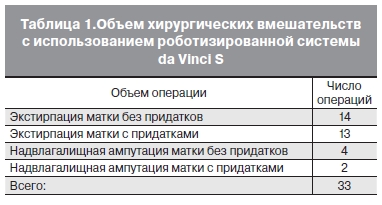
Размеры матки варьировались от 7 до 16 нед беременности, в среднем 12,4±2,6 нед. Хирургическая система da Vinci S (рис. 1, см. на вклейке) состоит из консоли хирурга, стойки с четырьмя интерактивными роботизированными руками («тележка пациента») и консоли «видеозрения». Для стереоскопической визуализации используется бинокулярная видеокамера. Все манипуляции в брюшной полости осуществляются специальными инструментами EndoWrist (рис. 2, см. на вклейке).
Операционная бригада состоит из одного хирурга, одного ассистента, операционной сестры, анестезиолога, анестезистки и санитарки. При подготовке к хирургическому вмешательству операционная сестра и ассистент закрывают стерильными чехлами подвижные части «тележки пациента», настраивают и тестируют видеокамеру. Затем хирург вместе с ассистентом устанавливают троакары и присоединяют к ним «руки» робота.
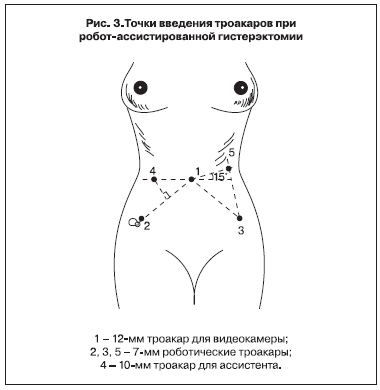
Расположение троакарных портов для роботассистированных операций несколько отличается от их традиционной установки при лапароскопических операциях (рис. 3). Порт камеры располагается над пупком на таком расстоянии, чтобы от конца видеокамеры до верхнего полюса опухоли было 8–10 см. Установка дополнительных троакаров производится под контролем эндоскопа. Стандартно используются два или три роботических троакара под углом 15о в мезогастрии слева и справа ниже пупка на расстоянии 8–10 см от камеры. Четвертый роботический троакар устанавливается на расстоянии 8–10 см от троакара для камеры и также под углом 15о. Ассистентский 10-мм троакар располагается справа на уровне пупка на расстоянии 5 см от порта для камеры. Хирург оперирует,
сидя за консолью в нестерильной зоне, управляя руками двумя джойстиками и пятью педалями.
Ассистент хирурга помогает хирургу – заменяет инструменты, подает и срезает лигатуры, осуществляет аквапурацию и выполняет другие необходимые действия. Операционная сестра
помогает работать ассистенту хирурга.
Этапы гистерэктомии с ипользованием роботизированной системы da Vinci S такие же, как и при лапароскопических операциях.
В настоящем исследовании был предусмотрен только первичный проспективный анализ эффективности робот-ассистированной гистерэктомии. Оценивались такие критерии, как время оперативного вмешательства, время работы хирурга за консолью, время анестезии, величина кровопотери, интраоперационные и послеоперационные (до 6 нед) осложнения.
Результаты исследования и их обсуждение
Результаты эффективности выполнения роботассистированных простых гистерэктомий представлены в табл. 2.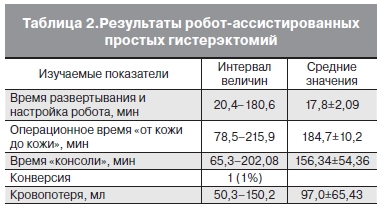
Подготовка роботического комплекса к операции на сегодняшний день не превышает 20 мин. Продолжительность операции «от кожи до кожи», то есть от первого разреза до последнего, составила 184,7±10,2 мин (от 78,5 до 215,9 мин). Средняя длительность оперативного вмешательства (время работы хирурга за консолью) составила 156,34±54,36 мин. Интраоперационная кровопотеря в среднем составила 97,0±65,43 мл (от 50,3 до 150,2 мл).
Интраоперационных и ранних послеоперационных осложнений не отмечено. В одном наблюдении осуществлен конверсионный переход с робот-ассистированной лапароскопии на стандартную в связи с большими размерами матки (16–18 нед беременности) и низким расположением двух миоматозных узлов, что в значительной степени ограничивало возможность манипуляций в брюшной полости. Операция была завершена лапароскопически. Анализируя этот клинический случай, мы сделали вывод, что при больших миомах матки робот-ассистированные вмешательства возможны, однако они требуют индивидуально ориентированного топографического расположения троакаров.
Средний послеоперационный койко-день составил 4,0.
Наш первый опыт выполнения простой гистерэктомии с использованием роботизированного комплекса da Vinci S позволяет выделить целый ряд преимуществ. Объемное трехмерное изображение с возможностью его увеличения дает лучший обзор операционного поля, а улучшенное 90о вращение искусственных запястьев инструментов, имеющих семь степеней свободы и в точности повторяющих движения рук хирурга, обеспечивают точность и контроль манипуляций. Интуитивные движения манипуляторов, то есть полностью подчиненные воле оператора, позволяют хирургам-гинекологам качественнее проводить сложные и объемные оперативные вмешательства и потенциально достигать лучших клинических результатов. Сенсорная защита от непроизвольных движений, когда активация «рук» робота возможна только при правильном положении головы хирурга в консоли, исключает случайные повреждения смежных органов и сосудов. Полное исключение тремора инструментов, минимум ассистентов и, наконец, эргономический комфорт хирурга, так как все его действия выполняются сидя с опорой предплечий на специальную подставку в консоли, предоставляют хирургу бóльшие технические возможности и обеспечивает лучшее качество выполнения операции.
К недостаткам робот-ассистированных операций можно было бы отнести следующие: большие размеры комплекса, требующие отдельной операционной; недостаточность обратной тактильной связи, правда, которая по мере приобретения навыков вполне компенсируется зрительными анализаторами; специальная подготовка хирургов и ассистентов; ограниченность вагинального доступа при стандартном положении «тележки пациента»; высокая стоимость оборудования, инструментов и их эксплутационные расходы. Однако все эти недостатки компенсируются той пользой, которую в конечном итоге приносит применение роботизированной техники для пациентов.
Заключение
За 200 лет проведения гинекологических операция, в частности простых гистерэктомий, произошел великий прорыв. Технический прогресс способствовал грандиозному усовершенствованию и продвижению выполнения простых гистерэктомий от лапаротомии E. McDowell до использования роботизированной системы. Минимально инвазивная робот-ассистированная хирургия является новой медицинской технологией, которая соединяет высококвалифицированную работу хирурга с самой современной техникой – микромеханикой, трехмерной визуализацией и компьютерным управлением.
Роботизированная система da Vinci S дает естественное уравнивание глаз и рук на хирургической консоли, что обеспечивает лучшую эргономику, чем традиционная лапароскопия. Так как роботизированные «руки» держат камеру и инструменты на весу, это потенциально уменьшает скручивающий момент на брюшной стенке, травму пациента, необходимость в ассистировании и утомляемость. Благодаря дополнительной механической силе, которую дают роботизированные руки, хирург может оперировать пациентов даже с выраженным ожирением.
Роботохирургия требует специального обучения, от хирурга требуются совсем другие навыки, чем при стандартных вмешательствах. Особенностями роботохирургии является потеря бинокулярного зрения, отсутствие чувства тканей.
Наш первичный анализ роботизированных хирургических вмешательств при простой гистерэктомии при доброкачественных опухолях матки с использованием роботизированного комплекса da Vinci S показал высокую эффективность и безопасности данной технологии в клинической практике.